The tale of “The ScottBot”
What’s a ScottBot?
Indeed, what should we call it? Scott prefers R.O.S.S. (remotely operated side scan), while others call it a ScanBot or something else. ScottBot seems to be the moniker that sticks, though.

Scott Harrison is this team’s relentless tinkerer. If he’s not reviewing past missions and training exercises, he’s always working on something to improve our ability to do the job. Over the past year or so, we’ve had several situations that needed a better tool. Car crashes into rivers, canal drownings, suicides from bridges or in small lakes, a missing person in a marina… Searching for a victim presented extra difficulty in these situations. They all had one thing in common: There wasn’t a reasonable way to deploy a boat with side scan sonar to search the large area required. And sometimes a no-technology manual large area search was untenable, too.
Enter the ScottBot. The idea was to re-use the transom-mounted sonar unit from our work boat, but on a much smaller remote controlled vehicle. We’d just need a new transducer unit, some propulsion and R/C gadgetry, and we’d have a tiny remote control boat that could run scans. Our Lowrance GPS and sonar unit has a built-in hotspot that lets us mirror what’s going on, so we just add an app to a tablet so we can manage the sonar from shore, and… Almost.

The prototype
During our maiden voyage with the prototype bot-boat, the on-shore app lost contact with the Lowrance unit on the water. Turns out, the system hotspot is only good for about a 30 - 50 foot range. We also found the end of the R/C range for controlling the boat, and watched it drift away in the current of the Alameda Estuary. Oops. A Good Samaritan in a rowboat bailed us out and retrieved the bot; lessons learned.
For the hotspot range, I recalled that Vernon Schurtz had built a similar remote-controlled system in Florida (he calls it a USSV, Uncrewed Sonar Search Vehicle), and asked his advice. (We met Vern virtually via Val Milosevic’ terrific Facebook resource for recovery dive teams) Unfortunately for us, his Garmin system works differently, and he’s able to put a powered antenna on the bot - that won’t work for our Lowrance. With the help of some AI, a different Navion app only available in Europe, and some tinkering with a shore-side directional powered receiver and local network mirror, we were able to build a shore-side range extender that lets us monitor and manage the sonar on the bot-boat from a reasonable distance. We also purchased some analytical software that lets us (Scott!) review our scans on a PC for analysis, measurement, GPS placement, etc.
Completed System
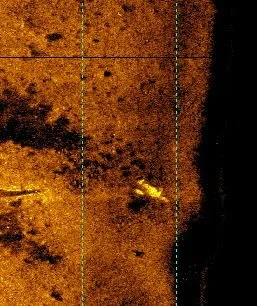
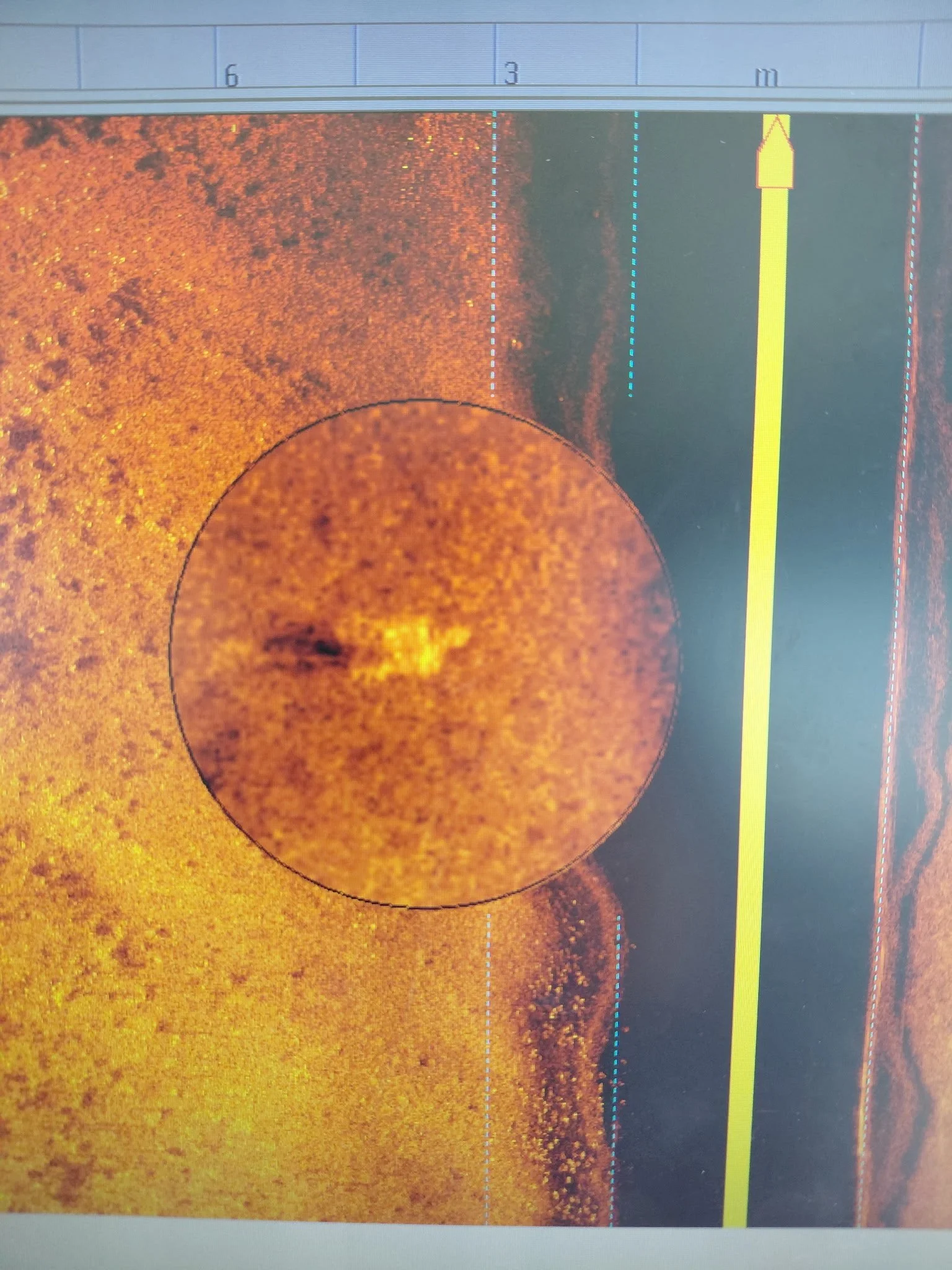
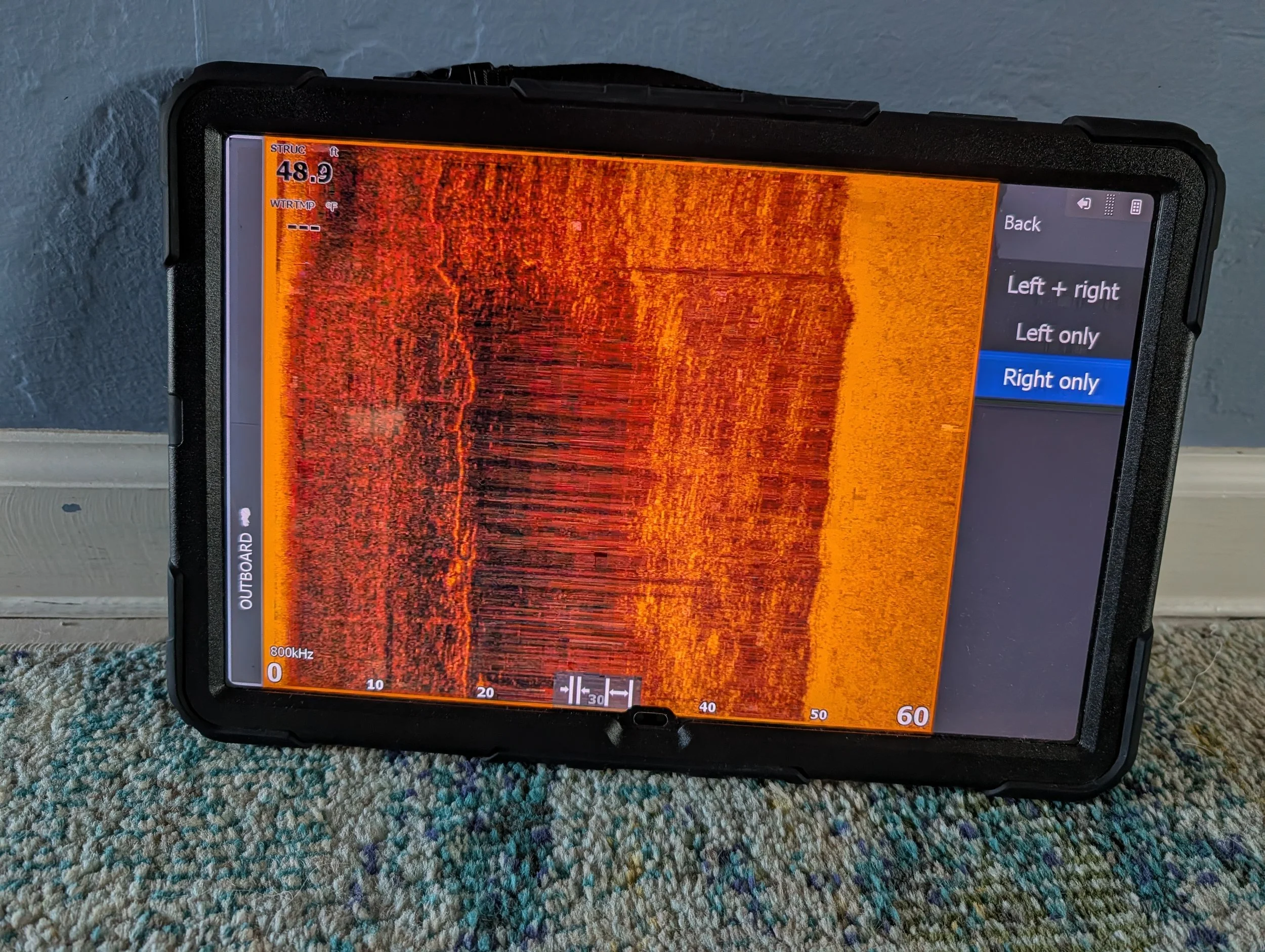
The images nearby are a harbor seal (we thought it was a training mannequin!), and shots from an actual operation with our control tablet.

We’ve now deployed this unit to assist in a recovery in the California Aqueduct, and we’ve tested it in lakes and salt-water marinas. We’re confident this is a useful tool for many situations in depth up to about 30’ where the use of a full boat is simply unworkable.
We just don’t have a name. So for now, we’ll just call it “The ScottBot”